
Review: SunFounder Remote Control Crawling Quadruped Robot V2.0
on
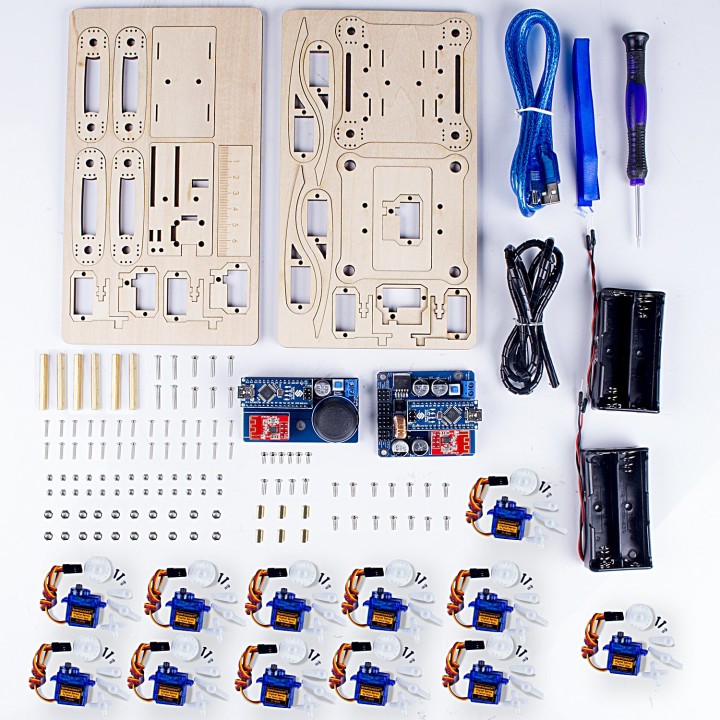
The box is quite tightly packed with parts, and as always with any kit, there is no harm in checking first whether the contents of the box is correct:
A printed manual with a parts list is not included, but there is a small card with a link for downloading the documentation and the software. Because I didn't have the motivation to type the entire link, I went to the website of SunFounder and found my own way to the assembly instructions. While there is nothing wrong with this method as such, I only realised later that careful reading would have been helpful: in the list of available manuals I clicked the first link that contained ‘Quadruped’ and as a consequence I had the wrong manual. The parts list didn't match (of course, I should have smelled a rat already) and then against better judgement, started the construction of the robot only to realise that this wasn't really going to work.... Of course, first you blame the manufacturer, only to discover with some humility that the name of the kit has the suffix ‘V2.0’ for a reason. A little further down the list there is indeed the correct manual with the correct parts lists. Well yes... nearly correct: there is still talk of ‘acrylic plates’, while the skeleton of this kit consists of wooden parts.
The batteries for this robot kit are not included in this box and are just a little bigger than penlight (AA) batteries: type 18650 3.7 V Li-ion cells, which is something not everyone is likely to have on hand already. Nevertheless, not a bad choice from the developers, these cells and appropriate chargers are not too expensive and available reasonably easily. As a result of the higher voltage per cell, these take up less space than a comparable pack of NiCd or NiMH batteries. But whichever way, you will have to obtain these before you can seriously play with this robot. During construction, testing and adjustment – which will really take you quite a while – you can already get started by using a bench power supply set to 7.5 V, but ultimately the robot will want to be wireless, of course. The 18650s that I ended up using didn't fit the battery holders very well and didn't make a good connection initially, the spring pressure was not strong enough. But this was solved by giving them a firm push.
Construction
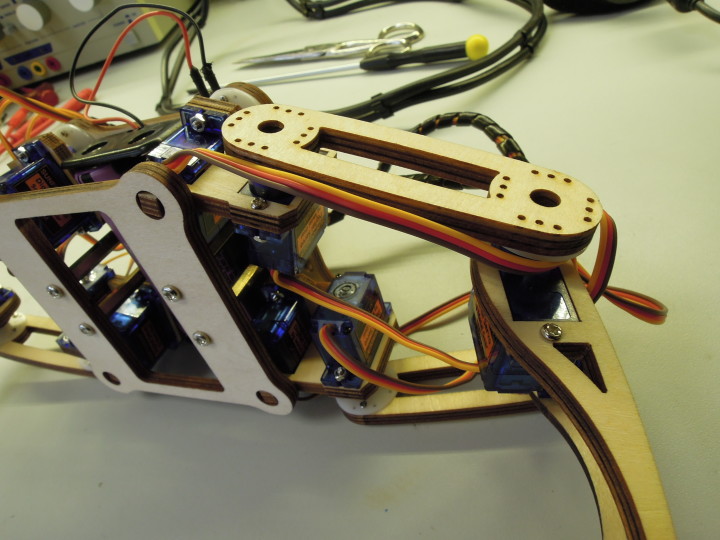
With the correct manual on hand the assembly is much easier. The instructions are very clear, well illustrated and divided in logical steps. You can easily stop at the end of a building phase and continue a day or more later, which is not an unnecessary luxury, considering the amount of work that needs to be done to reach the final result. It is certainly not a kit that you will put together in a spare hour, take your time and don't rush it.The supplied screwdriver fits the small screws and bolts well and can be magnetised, which comes in handy now and then. It is very convenient (read: essential) to have small needle-nose pliers or tweezers available to hold (mainly) nuts in place during assembly:

Fortunately SunFounder have supplied a few extra screws and nuts, so if you drop one or it flies away then that is not the end of the world. Everything fits very well, all parts are have been made the correct size and are finished very nicely. Only the connectors for the servos are a little too close together, which means that more force is required to put them in their place, but this is not insurmountable.
Finally you will a completely assembled robot standing there and now the instructions say that you have to arrange the cables to the servos with the supplied spiral wrap. That makes sense, the legs of the robot do not want the get tangled with the wiring when the robot is in motion, but a little more explanation of how best to do this would have been welcome.
I estimated it myself, using four pieces of a little over 10 cm in length each, to tie up the three cables from the servo board to each leg. Enough was left over from the spiral wrap to put on any finishing touches later and this gave a quite satisfactory result. Take care during the first ‘walking attempts’ to check whether the wiring is not too tight or too loose and adjust the cable routing accordingly.
Calibration procedure
After this the robot still needs to be calibrated, the servos and with that the position of the segments of the legs need to be adjusted in software such that the quadruped walks properly. While this calibration procedure is also clearly described, in practice it was a little less straightforward. A paper diagram and a ruler have been supplied to measure the position of the legs, but it doesn't really work all that good. It is a bit tricky to get the robot aligned on the paper for the measurements, but fortunately it doesn't need to be all that accurate and you will soon have a robot that is ready for use.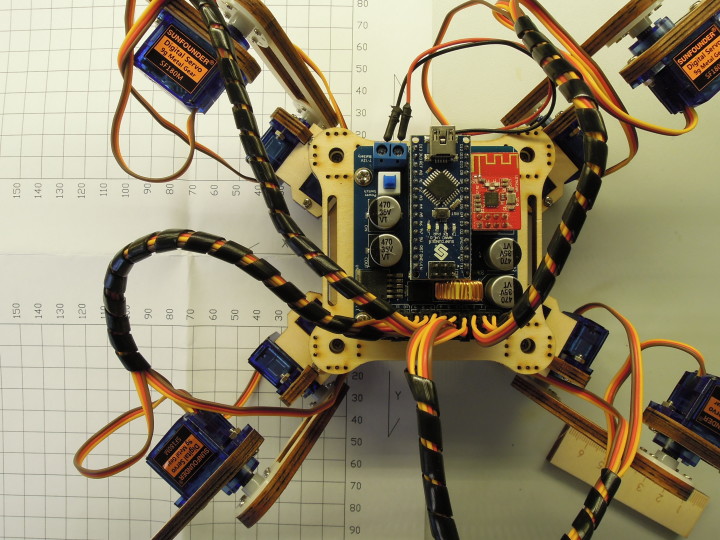
You can now let to robot walk around and control it with the remote control or let it dance using the Arduino sketches that are included with the download. You can, of course, also modify the software yourself, the manual also gives an explanation of how the movements of the legs are translated in the software, but this is definitely an advanced subject matter.
Conclusion
According to the manufacturers, this kit was designed for educational use, to introduce children to robotics and Arduino software. I think that guidance by someone who is familiar with this kit will be very helpful. Nevertheless, anyone should be able to get the robot to work properly. There is – almost – nothing to criticise in the manual and also the mechanical parts have been designed and crafted well. The explanation of working with the Arduino software is also clear, although I realise that this will be a little bit more effort for people who have little or no experience in this area.Whatever you end up doing with the robot: the construction is in any case already a tinkering feast (also for adults!) which will keep you occupied for quite a few hours.
Discussion (0 comments)