| Communication over the IrDA port uses a relatively complex protocol but its possible to send a single character using just a few components....

Burkhard Kainka (228)
€5 (FREE for Members)
€5 (FREE for Members)
| A universal voltage tester should respond to both dc and ac voltages. The usual types with glow-discharge lamps only work with voltages grea...
€5 (FREE for Members)
| Palm Pilots are just one of the devices that use the IrDA standard for infrared data communication. Most Desktop PCs are not equipped with a...
€5 (FREE for Members)

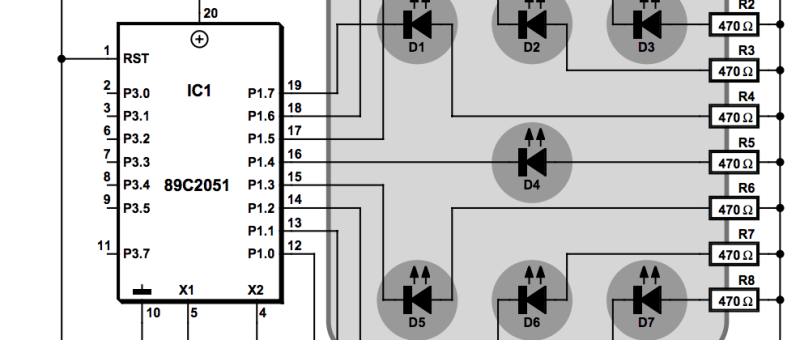
| White light LEDs have been a long time in the making. This design (as part of our Mini Project series) employs a simple circuit to make the...
€5 (FREE for Members)
| Data output from the Flash Board usually takes place via the connected terminal, which means the PC. However, for stand-alone use without a...
€5 (FREE for Members)
| Till now, the BASIC-52 interpreter was the only choice if you want to run BASIC on the extremely popular Elektor Flash Microcontroller Board...
€5 (FREE for Members)
| The previous instalments of the Microcontroller Basics Course have primarily concentrated on programming languages. Now it’s time to take a...
€5 (FREE for Members)
| Writing a microcontroller program and implementing it in real hardware simply requires a development system. The Elektor Electronics 89S8252...
€5 (FREE for Members)
| In some situations and locations, the use of a mobile phone is forbidden. You may be discussing sensitive information in a closed meeting or...
€5 (FREE for Members)
| In the first two instalments of the course, we worked with assembler, but now it’s time to use a high-level language: BASIC-52.This interpre...