The Connected Autonomous Vehicle and Its Environment
Autonomous and connected vehicles are moving from concept to reality. And building them demands more than sensors and code. The book, Connected Autonomous Vehicle and Its Environment, delivers an engineering-first roadmap from ITS and V2X to safety-critical electronics, capped by the hands-on MINI-CAV project that turns system-level theory into real testing and design trade-offs.
Autonomous and connected vehicles are no longer a distant promise. They are steadily becoming part of everyday mobility, driven by advances in sensing technologies, connectivity, electronics, and software. In The Connected Autonomous Vehicle and Its Environment, Jacques Ehrlich offers a practical and engineering-focused guide to how these systems work, and how they can be designed, tested, and refined in real-world conditions.
The book looks beyond individual technologies to address autonomous driving as an integrated system. It examines how vehicles perceive their surroundings, make decisions, and interact with infrastructure and other road users, while also addressing the growing complexity of on-board electronics and safety requirements.
From Intelligent Transportation Systems to Autonomous Vehicle Engineering
The opening chapters place connected and autonomous vehicles (CAVs) within the context of Intelligent Transportation Systems (ITS). Key domains, stakeholders, and reference architectures are introduced, followed by a concise historical overview that traces the evolution from early research projects to today’s ADAS-driven path toward higher levels of automation.
Path planning is identified as one of the core technical challenges of autonomous driving. The book clearly distinguishes between operational, tactical, and strategic planning, and shows how vehicle dynamics, constraints, and real-time perception must work together to produce safe and reliable trajectories.
Connectivity is treated as an integral part of the system rather than an add-on. The book explains how vehicles exchange information with infrastructure and with each other using standardized messages, and how this data can improve safety, traffic flow, and situational awareness. Infrastructure-related concepts such as Operational Design Domains (ODD) and Infrastructure Support for Automated Driving (ISAD) are introduced to provide a realistic view of deployment conditions and limitations.
Electronics Architectures and Safety Considerations
Embedded electronics account for a significant share of both cost and complexity in modern vehicles, and the book devotes substantial attention to this topic. Distributed electronic architectures, ECUs, communication buses, and design methodologies are explained in a clear and structured way, supported by practical examples and a detailed case study.
Safety is treated throughout as a design requirement, not a final check. Readers are introduced to preliminary hazard analysis, Automotive Safety Integrity Levels (ASIL), and Safety of the Intended Functionality (SOTIF), with concrete examples showing how functional safety and intended functionality complement each other in autonomous vehicle development.
Hands-On Autonomous Vehicle Engineering with the MINI-CAV Project
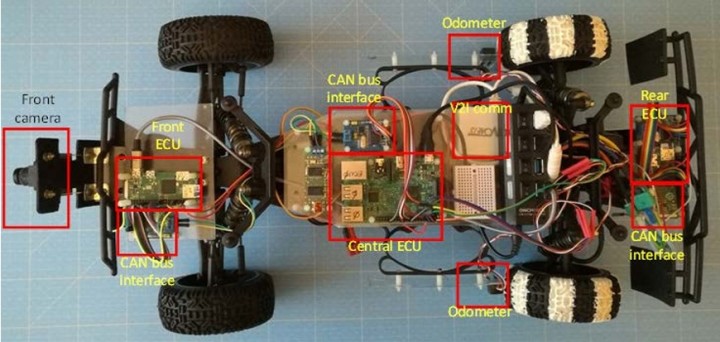
One of the most distinctive parts of the book is the MINI-CAV project, a 1:10-scale autonomous vehicle developed as both a learning platform and a research testbed. Rather than presenting a turnkey solution, the project encourages experimentation, collaboration, and incremental development. MINI-CAV fully equipped with sensors, actuators, and distributed on-board electronics.
The vehicle operates on a dedicated scaled test track with lane markings and obstacles. A series of use cases increases gradually in complexity, starting with basic lane following and progressing to obstacle detection, speed adaptation, and lane changes triggered by infrastructure commands.
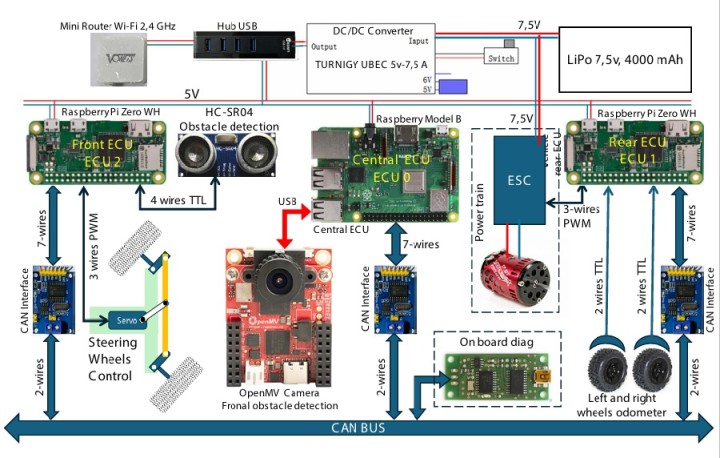
MINI-CAV also serves as a practical platform for exploring real engineering trade-offs, including sensor placement, power distribution, task allocation across multiple ECUs, and communication strategies. Technical architecture of MINI-CAV, showing multiple Raspberry Pi-based ECUs connected via CAN bus and Wi-Fi.
From Experimentation to System-Level Understanding
By combining theoretical foundations, real-world context, and a substantial hands-on project, The Connected Autonomous Vehicle and Its Environmentprovides a realistic picture of what it takes to design and build autonomous vehicle systems. It is aimed at engineers, advanced students, and technically minded readers who want to move beyond isolated components and understand autonomous driving as a complete, interconnected system.
For those interested in autonomous systems, embedded electronics, and the future of connected mobility, the book offers both a solid technical foundation and a practical entry point into experimentation and system-level thinking.
Subscribe
Tag alert: Subscribe to the tag Autonomous Vehicles and you will receive an e-mail as soon as a new item about it is published on our website!
Elektor Magazine has been one of the leading sources of information on electronics for engineers, designers, start-ups and companies for 65 years. Our magazine is powered by an active community of electronics engineers – from students to professionals – who are passionate about designing and sharing innovative ideas.
For them, we publish hundreds of items a year, in formats such as articles, videos, webinars, and other learning formats. Our mission is to share knowledge in every possible way and inspire readers with the latest developments within the electrical engineering sector.
Thank you for your vote!
Leave further comments in the fields below.
Thank you for your vote!
If you wish to leave a comment with your rating, please first use the login below. If not, just close this window.






Discussion (0 comments)