
DIY Brainless Robots Exhibit Collective Behavior
March 19, 2013
on
on
We’ve all seen the amazing capabilities of flocks of birds and schools of fish to move seemingly as one. Such collective behavior can be witnessed in almost all living systems. A lot of research is going into figuring out how swarm behavior works in order to mimic nature’s capabilities in swarm robotics. In these multirobot systems a large number of relatively simple robots can accomplish complex tasks through interdependent cooperation.
The ability of an individual agent to participate in collective behavior is often linked to cognition and social interaction implying that swarmbots require computational power and a sensor to function. But now scientists of Harvard university have demonstrated that brainless robots self-organize into coherent collective motion.
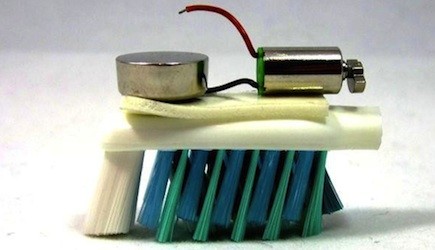
The robots used in the experiment are BristleBots (Bbots). These are very simple robots anyone can build for $5 from a toothbrush, a pager motor and a battery. When the brush head is pressed to the ground, the angled bristles give it forward movement. With a speed of 150 rounds per second, the motor turns the brush into a self-propelling robot. The Bbots don’t have computing power or sensors.
The scientists Luca Giomi, Nico Hawley-Weld and L. Mahadevan of the School of Engineering and Applied Sciences custom-build two different kinds of Bbots, Walkers and Spinners. Both have an elliptical chassis but Walkers have long bristles making them move in a straight line while the Spinners with their short bristles move in a circle.
The Harvard men placed the Bbots in a circular arena with upward sloping boundaries. When the Bbots ran up against the edge they were forced back. When less than ten Bbots populated the arena, they moved around randomly but once they exceeded that number they self-organized and showed collective behavior. The Spinners grouped up and moved along the boundary together and the Walkers eventually ended up standing still side by side.
In their paper Giomi and his colleagues point out that although the Bbots don’t have sensors they do sense each other and their environment through contact interaction. The elliptical shape of the Bbots, their movement and spatial interaction are sufficient to produce collective motion. This suggests swarm behavior need not be dependent on cognition and social skills but can also be achieved by mechanical intelligence.
The outcome of the study is significant for the development of swarm robotics. The Walkers and Spinners could serve as terrain explorers because they translate their interactions with the environment into dynamic behavior. Their lack of artificial intelligence and sensors makes them very cheap and robust allowing for the deployment of vast numbers of Bbots.
And, as mentioned in the video, it also raises the more philosophical question how unintelligent ‘non-intelligent’ creatures actually are.
Image: browndoggadgets.com
The ability of an individual agent to participate in collective behavior is often linked to cognition and social interaction implying that swarmbots require computational power and a sensor to function. But now scientists of Harvard university have demonstrated that brainless robots self-organize into coherent collective motion.
The robots used in the experiment are BristleBots (Bbots). These are very simple robots anyone can build for $5 from a toothbrush, a pager motor and a battery. When the brush head is pressed to the ground, the angled bristles give it forward movement. With a speed of 150 rounds per second, the motor turns the brush into a self-propelling robot. The Bbots don’t have computing power or sensors.
The scientists Luca Giomi, Nico Hawley-Weld and L. Mahadevan of the School of Engineering and Applied Sciences custom-build two different kinds of Bbots, Walkers and Spinners. Both have an elliptical chassis but Walkers have long bristles making them move in a straight line while the Spinners with their short bristles move in a circle.
The Harvard men placed the Bbots in a circular arena with upward sloping boundaries. When the Bbots ran up against the edge they were forced back. When less than ten Bbots populated the arena, they moved around randomly but once they exceeded that number they self-organized and showed collective behavior. The Spinners grouped up and moved along the boundary together and the Walkers eventually ended up standing still side by side.
In their paper Giomi and his colleagues point out that although the Bbots don’t have sensors they do sense each other and their environment through contact interaction. The elliptical shape of the Bbots, their movement and spatial interaction are sufficient to produce collective motion. This suggests swarm behavior need not be dependent on cognition and social skills but can also be achieved by mechanical intelligence.
The outcome of the study is significant for the development of swarm robotics. The Walkers and Spinners could serve as terrain explorers because they translate their interactions with the environment into dynamic behavior. Their lack of artificial intelligence and sensors makes them very cheap and robust allowing for the deployment of vast numbers of Bbots.
And, as mentioned in the video, it also raises the more philosophical question how unintelligent ‘non-intelligent’ creatures actually are.
Image: browndoggadgets.com
Read full article
Hide full article
Discussion (0 comments)