
€5 (FREE for Members)
Article
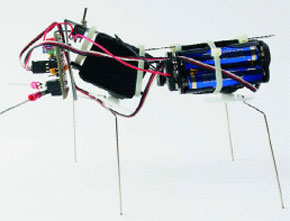
Walking Bug
A robot with servo-powered legs
EUR
Continue reading this article with an Elektor Membership.
Join tens of thousands of engineers and electronics enthusiasts worldwide as a
member. Enjoy access to Elektor Magazine, the Elektor library, exclusive discounts,
early notification about Academy Pro products, and more. Select a membership
today and start exploring everything Elektor has to offer. Log in here if you are already a member.

PRINT (Gold)
- 8x Elektor Magazine (Print)
- 8x Elektor Magazine (Digital)
- Access to the Elektor Archive*
- Access to over 5,000 Gerber files
- 10% at the Elektor Store*
€ 144.95
Price per year
plus a delivery charge of 20 euros (US, UK, Ireland).
*Member discount and unlimited archive access only for full GOLD or GREEN members. Trial members have limited access to the online archive.

DIGITAL (Green)
- 8x Elektor Magazine (Print)
- 8x Elektor Magazine (Digital)
- Access to the Elektor Archive*
- Access to over 5,000 Gerber files
- 10% at the Elektor Store*
€ 99.95
Price per year
or
€ 20.00
4 month trial
You can only subscribe to a trial once.
* Member discount and unlimited archive access only for full GOLD or GREEN members. Trial members have limited access to the online archive.

BUY THIS ARTICLE (PDF)
Get instant access to this Elektor article and keep it forever. Download your PDF
today and dive into Elektor’s world of innovation and electronics know-how.
€ 5.00
Discussion (0 comments)