
U-CAT, a Biomimetic Undersea Robot
on
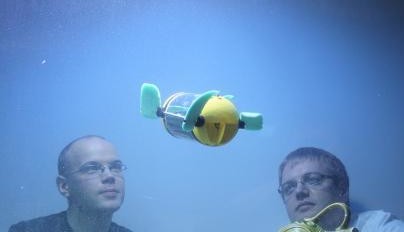
The Robot Safari event at the London Science Museum will see the premiere of the autonomous underwater robot U-CAT, a highly maneuverable robot turtle, designed to investigate shipwrecks.
In place of the usual propeller screw propulsion system the U-CAT uses four flippers which mimic the action of sea turtles. The independently controlled flippers give the craft extreme maneuverability. They also produce low levels of turbulence so that water clarity and camera images are not obscured by disturbed silt which can be a problem with conventional propulsion methods.
Larger underwater craft are used by the oil and gas industry to inspect off-shore rigs but the purpose of U-CAT is to investigate shipwrecks which can be hazardous environments for divers. The craft is small enough to explore parts of a wreck that would otherwise be off-limits to a human diver.
The designer of U-CAT, Taavi Salumäe from the Centre for Biorobotics, Tallinn University of Technology said that this is an example of a biomimetic robot, which mimics mechanisms found in nature to overcome problems of traditional engineering.
U-CAT is part of an EU funded research project ARROWS, which develops technologies to assist underwater archaeologists. It will be deployed in the Mediterranean and Baltic Sea to help map and identify underwater sites. The Robot Safari exhibition runs from Nov. 28 to Dec. 1 at the Science Museum.
Discussion (0 comments)