![Easy Sceptre programming with Oberon-07 [100574]](https://cdn.xingosoftware.com/elektor/images/fetch/dpr_1,w_800,h_340,c_fit/https%3A%2F%2Fwww.elektormagazine.com%2Fassets%2Fupload%2Fimg%2Fpublic%2Foriginal%2F100574-53-screenshot.png)
| The Oberon high-level, modular programming language with its origins in Pascal and Modula-2 can be used to program the Sceptre.

More about Oberon (4)
| Running on an entry-level FPGA, Project Oberon is a design for a complete desktop computer system from scratch. Its simplicity and clarity e...

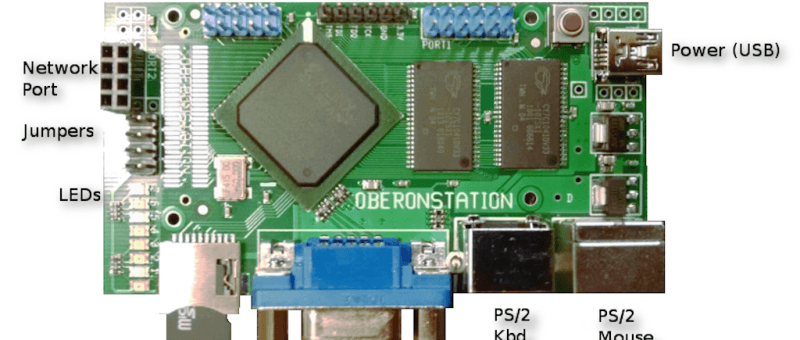
| The Scepter bundle is a complete 32-bit embedded development platform for many applications including multimedia. The Scepter is an Elektor...
€5 (FREE for Members)

| Embedded Beaker!Beaker from the Muppet Show can be built as an interactive puppet and his presence and responses (sort of) enjoyed for all t...