
YDLidar X4: A Low-Cost Solution that Sees 360º
January 25, 2021
on
on
The YDLidar X4 is a very affordable Lidar that is mainly intended for applications in robots. The software is targeted at Visual Studio 2010 and there are demo applications for Windows and Linux. All necessary libraries are freely available, of course. The Lidar measures 360º around and detects obstacles from 12 cm to more than 10 meters

This is also true for the YDLidar X4. This uses a laser with a wavelength of 785 nm and a power of 3 mW (so, not visible, be careful with your eyes!). This means, of course, that the system is dependent on how well a surface reflects infrared light.
The YDLidar X4 uses a rotating head that contains both the laser as well as the receiver. With this rotating head the system can 'see' 360º around itself. But only in one plane (2-dimensional), that goes without saying.
The manual too, is only available (download) in digital format. All of this can be found on the following website: http://ydlidar.com/download.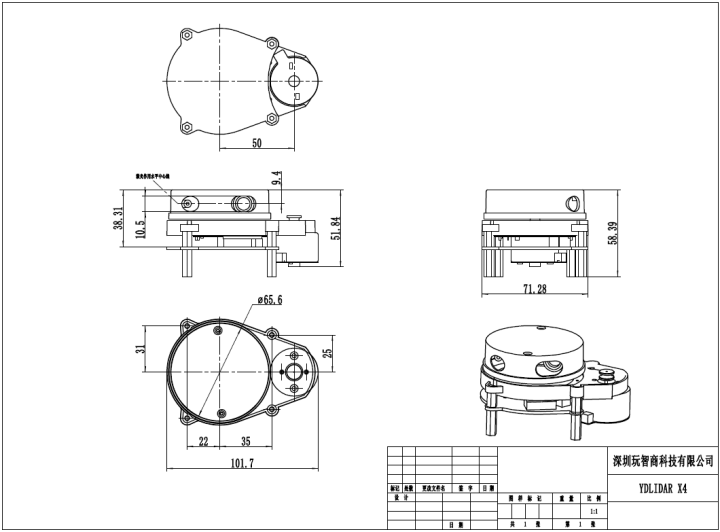
Lidar
Lidar stands for Light Detection and Ranging and uses a pulsing laser to measure the distance to objects. The laser is reflected off the surface of the object and by measuring the time it takes for the light to reach the sensor, the distance to the object is determined. Usually a laser is selected that uses a wavelength of light that is outside of the visible spectrum, generally in the infrared range.This is also true for the YDLidar X4. This uses a laser with a wavelength of 785 nm and a power of 3 mW (so, not visible, be careful with your eyes!). This means, of course, that the system is dependent on how well a surface reflects infrared light.
The YDLidar X4 uses a rotating head that contains both the laser as well as the receiver. With this rotating head the system can 'see' 360º around itself. But only in one plane (2-dimensional), that goes without saying.
The contents
The contents of the packaging is reasonably complete. In addition to the rotating part with the motor controller, we find a small USB interface board that has two micro-USB connectors and a connector for connecting to the board that controls the motor and rotating head. One micro-USB connector (“USB_DATA”) is for a interfacing to a computer and an additional connector is for an optional additional power supply, in the event that the power supply from the computer is insufficient. An additional interface cable is also supplied. You can use this to control the unit directly from your robot hardware, without the need of the USB interface. A spare V-belt is also supplied, together with four screws for mounting the unit. You will also find a USB cable for connecting to a computer in the box.YDLidar X4 Software
There are a number of (free!) software packages that go with the YDLidar X4. You will have to download those yourself; no CD or similar is provided. But that is typical these days. This way you will immediately have the latest version and can see what has changed/improved compared to the previous version(s).The manual too, is only available (download) in digital format. All of this can be found on the following website: http://ydlidar.com/download.
A 3D model in STL/IGS format is available. A datasheet with all the specifications and, for example, also the layout of the connector for controlling the unit, a development manual that explains how the system works (block diagram), communicates, and how the data protocol is formatted. The user manual with installation instructions for Windows, Linux and an ROS installation package (Robot Operating System). An SDK package with descriptions on how to get the YDLidar to work with Visual Studio 2010 under Windows or Linux. A package with tools, containing the drivers for the USB interface board and standalone interface programs for both Windows as well as Linux. The ROS installation is intended for the Kinetic-variant of ROS.
Read full article
Hide full article
Discussion (2 comments)