
Locating Wayward Wires
on
It all began two years ago. In springtime the grass began to grow on my lawn and the lawn mower had to be awakened from its hibernation, given a quick overhaul, refuelled and then used as intended. But already during the previous year I noticed how evenly the lawn next door had been cut by a robotic lawnmower or lawn robot. Why mow yourself, if this can be done automatically? Thought, bought, but still far from finished...
Lines and lawns
Eagerly holding the monstrous box of a newly acquired piece of technology, you are faced with problems that are easily – and grossly – underestimated. While researching which machines would be suitable for my U-shaped garden (with several pinch-points barely one metre wide), I naturally also discovered the quirks of these potential mowing slaves. I knew that robotic mowers of this kind are actually quite ‘unintelligent’ and make their trips through the grass fairly randomly. If they bump into something, they reverse, turn a little (again randomly) and try once more until their daily time allowance for mowing is finished (or the battery is running low).
As robots go, they are rather stupid, because they have no camera or inbuilt cognitive map to make intelligent decisions. In order to prevent them from leaving your property altogether and to exclude areas that are not to be mowed, you have to lay a boundary wire all around for their guidance. And to find its charging station, the robot needs an extra search line – laid on the lawn or better, in the ground. Through all of these wires flows a pulsed current, and thanks to built-in sensors that detect the magnetic fields, the robot knows where it is. With my robot (Figure 1) the signal is also password-encrypted with a unique secret code, making a stolen Robby The Robot also a Robby that’s unusable by anyone else. At least that’s a deterrent to any thieves who can add up to three. On the other hand, the only additional luxury with my example is a radio connection to the Internet via a modem. This means I can check on my smartphone, from anywhere in the world, what the robot is doing and send it back into its little house (Figure 2) in heavy rain, for example.


No gain without pain, though. Before I could enjoy the reward of watching mowing carried out robotically, the gods now set me the task of cable laying operations. For me, this involved putting down a green single-core conductor of approx. 1.5-square millimetre cross-section, a good 500 m long in fact. If you want to make things easy for yourself, lay the line directly on the grass and tack it down every 50 cm with a kind of plastic tent peg (see Figure 3). Over time, the wire disappears into the undergrowth of the lawn. So says the manufacturer. And in general, it’s true. However, this is only practicable in areas where you rarely set foot, otherwise you create trip hazards for yourself. Around paths and flower beds it is better to lay the line 10 to 20 cm below the earth, stones or (concrete) slabs. Alternatively, you can (laboriously) make slits in the lawn with a flat (straight) spade and press the wire into the earth with your fingers. Or you can hire a professional with a cable-laying machine to do this sweaty job in a short time.

I had to contend with all four methods, because just after I had finished my labours, I discovered the consequences of an incorrect statement in the manual. This said that the distance between the cable and any edges or obstacles could be set between 15 and 50 cm. Trusting this guidance, I laid the cables at a distance of 20 cm from the actual boundary. Subsequently, when configuring my robot, I noticed the minimum distance was now stated to be 25 cm. However, my cursing bore fruit, as the manufacturer kindly sent out a professional with a laying machine, who then re-buried the 250 m of wire that I had already laid, this time at a distance of 30 cm. Everything was fine and the mower mowed excellently, as I had schemed and hoped.
Cable breaks
My luck didn’t last long, however. When you are involved so intensively with your lawn, you also take good care of it. In my case this was waging war on the dandelions. Since I knew where the cables were, I was the only one allowed to tackle these pesky opponents. At first, things went quite well. But then, at some point, it happened: while slicing the stem of a magnificent dandelion, I found myself adrift by several centimetres and the lawn robot stopped dead in its tracks. I had sliced the cable as well. No big problem, because I knew exactly where I had been gardening in perilous proximity to the buried power source. After some digging, I saw the severed cable ends. If there is some slack, you put the ends into a special, gel-filled, waterproof connector (Figure 4), squeeze the clamp and all’s well again.

This mishap was not a one-off occurrence, though. In the second year of the autonomous lawn mowing I apparently became more careless, because I had been rooting out some undesired plant growth at the edge of the garden, spread across several metres. Then I noticed that Robby had stopped helplessly, having lost its orientation entirely. This was right at the edge where the professional cable-laying machine had been used. Here the wires were particularly deep and not buried in the ground by myself. So, what to do? Unearth every possible location, one after the other? Or seek aid using technology?
As an electronicist, I have a natural leaning towards technical solutions. So, with my brow furrowed by anxious thoughts, I did the obvious. I took a coffee break and then put Google to the test.
Trial and error
My first thought was to disconnect all cables from the charging station (Figure 5) in the re-purposed dog kennel and to connect them directly to mains voltage via a ‘series resistor’ (in fact a lamp bulb). Then arcing and sparking noises ought to be heard at the defective place – if the ground was damp enough. This expectation turned out to be over-optimistic: it didn’t work! Standing upright, nothing was to be heard, no matter which cable end I connected to the mains. And down at lawn level and turning my ear towards the blades of grass was a bit too risky for me, because an ear is fastened on the outside of the thought-process enclosure and neurons are incompatible with 230 V. [Editor’s note: We strongly advise against using AC powerline voltage as a test tool — experiments of this kind can be fatal!

What next? I would have liked Hall sensors, but with cable breaks there is no current flow and where there is no current, there is no magnetic field. The robot had already proved this!
Google mentioned that robot mowers or their charging stations inject pulsating signals into the wires, the harmonics of which can be received with a long-wave radio. VHF would not work so well, because damp soil screens (shields) higher frequencies quite well. So, it had to be long-wave. But where do you get such an antique device unless you steal it? In my home I get my radio from the Internet and/or the cable network socket. But my mother had an analogue portable radio in the kitchen. So, I tried with this radio on a temporary loan basis. You can only connect one end of the cable to the charging station at a time, because if both ends of the cut cable are fed with this signal, you will never find the breaking point. After all, location by electromagnetic radiation means is hardly ultra-precise. But to cut a long story short: it all worked!
You can clearly notice a change in the background noise or crackling when you bring the radio close to a wire carrying this signal. You then adjust the volume control to make the audible note change even with small changes in distance. This even works with wires buried at 20 cm depth. I then needed only three to four test runs at ground level to find the point where the signal stopped abruptly. I was more than relieved and while repairing the point of damage, I swore in gratitude that I’d buy Google a beer if I ever met "it".
Other instances
Those who occasionally need to drill holes in walls in order to hang up a picture or fix a shelf using wall plugs and screws will always have a queasy feeling, even if they observe the normal rule of thumb that cables embedded in walls always run vertically or horizontally from a socket or switch. Even though this rule has been followed quite well in Germany and elsewhere since the 1950s, there are a) exceptions and b) older buildings with ‘unfettered’ wiring. In addition, in bathrooms and other wet rooms the electrical installation is not the only thing you have to worry about. Ultimately, you have to know if there is anything metallic hidden in the wall before you use the hammer drill.
If it is only a question of whether a cable or pipe is located near the planned borehole, then one of the ‘metal detectors’ available in every DIY store will be suitable for this purpose. The decision process these devices adopt for whether you can risk drilling runs along the lines of ‘possibly some obstacle there or probably nothing’. Somewhat better devices like mine (Figure 6) have different operating modes and can allegedly detect wood (in my experience, between rather badly and not at all) and/or its humidity, metal (the regardless of whether iron or non-ferrous — that works half the time) as well as electrical alternating fields (this also works half the time). For the normal household installations, a device of this type is sufficient and is at least better than nothing.

Recently, however, I tested a ‘real’ metal detector for Elektor, the type CS-400 from Velleman (Figure 7) [1]. I found out that such a device is particularly suitable for detecting hidden metal pipework. A ‘treasure detector’ like this is very well suited for locating studs (wooden beams) behind plasterboard precisely. Even inexpensive variants of correct metal detectors are much more accurate and reliable than the simple devices found in DIY stores – but also more expensive and somewhat more unwieldy.

With a metal detector — no matter whether it’s super-sensitive like the one from Velleman or cheap and basic like the one from the DIY store — you can find hidden metal and more in walls or in the ground. But what is still impossible is locating cable breaks, because the separation points are typically so narrow that the spatial resolution is not sufficient. So, we need to use the radio method there. But what if there’s no RF signal or none with fast rise and fall edges?
In that case you build yourself a generator!
A solution for all situations
My experience with under-lawn wires (and other previous considerations) led to a growing desire for a method that would work (almost) always and everywhere. This holds good also in cases where a lawn robot does not provide steep-edged signals that can be detected with a radio. Or indeed where a power cable runs below-ground for other reasons (such as for powering an outside lamp) and ends up making intimate acquaintance with a spade or a motor hoe. In all cases involving severed cables we need something electronic to generate the necessary signal for detection by a suitable receiver.
It is not difficult to build something like this. But first you should define some criteria. It is clear that the soil (or solid walls) attenuate higher frequencies more than they do lower frequencies. And since radios already exist, you don’t have to build a receiver from scratch. Ideally you should buy a radio with a long-wave range. The fact that in Germany, as in some other European countries, the sale of purely analogue radios may soon end is unproblematic, because the integrated digital receivers in newer radios do not generate interference. And in any case, you still have eBay. There I bought a long-wave radio (Figure 8) of my own for a stupidly small price — and you can do the same if you don’t already have one of these devices standing around. By the way, it doesn’t necessarily have to be a radio with LW range. Medium wave usually works as well, as long as the edges of the signal to be detected are steep enough. Just give it a try...

Signal injector
An amplitude-modulated signal for reception on a long-wave radio does not take long to make. You could use a standard small microcontroller and a few lines of code would suffice. But if we are already dealing with analogue technology, then an analogue circuit ought to be used too. So how about the IC of all ICs, the 555 timer?
This works in principle. But if you want an amplitude modulated signal, you need two timer ICs – one for the AF and one for the HF. There’s something like this in a single package: the 556 is a double 555. It would be so nice and simple, except that a normal 555, just like its dual colleague 556, has the disadvantage that it needs 5 V for power supply, in some quantity, which is bad news for a battery supply. Fortunately, however, a CMOS version of the 556 is available. The IC TLC556 works great from 2 V upwards and can therefore be powered adequately by two AA or AAA cells or a CR3032 lithium coin cell.
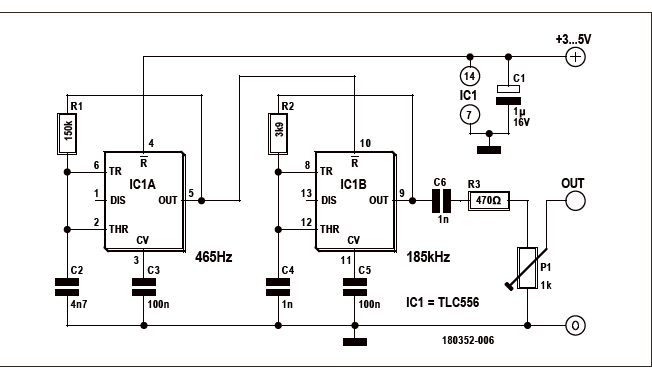
For this reason, this IC was used for the circuit of the universal signal injector in Figure 9. Along with R1 and C2, Timer 1 (IC1A) generates a symmetrical squarewave signal of 465 Hz, i.e. a semitone above the concert pitch of A. In this way a 185 kHz square wave signal, amplitude-modulated by 465 Hz and fixed by R2 and C4, is generated via the reset input of IC2A. With P1 you can adjust the amplitude of the signal fed into the wire in such a way that it can still be received well on the radio. R3 serves purely for short-circuit protection.

The component values chosen are not set in stone. The third or fifth harmonic of Timer 2 should still have enough amplitude to be received close up with a medium wave receiver. If you are unlucky enough to live near strong transmitters operating around 185 kHz, you can of course use R2 to achieve some slightly differing frequency. The following applies: f = 0.725 / (R2 C4).
Want more great Elektor content like this?
Then take out an Elektor membership today and never miss an article, project, or tutorial.
Discussion (0 comments)