
Remote Control for Hover-Catamaran
Remote Control for a toy Hover-Catamaran based on ESP8266. The control is performed via an Android tablet.
My grandson has built a simple Hover-driven Catamaran based on two PET bottles and driven by two fans. After his basic tests, he asked me to equippe it with a remote control, what I did with pleasure. It can steer the Catamaran direction by giving more power to the right or left fan und the speed by the regulation of the power for both fans. In addition it has a monitor for the mission critical battery voltage.
As MCU, I have choosed the splendid ESP8266 on a module ESP-201. This MCU controls a motor driver L293 for the power control of the fans. Unfortunately, these 5 V fans are not suited for normal PCM frequencies, so a rather large PCM period of 1 second was necessary. The ADC of the ESP monitors the battery voltage, which will be sent on request to the client. The power of the electronic and the fans are separated in order to avoid noise faults. More details you can see in the attached schematics.
The firmware has been written in C using the unofficial development system of Cherts. It configures the ESP as a freestanding, yet unsecured, WLAN, able to connect a small number of clients. Its IP address is 10.10.10.1 and the clients get addresses starting at 10.10.10.11. A TCP server listens for incoming messages from client and puts them into action.
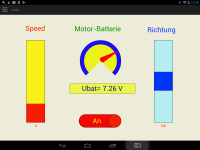
An Android tablet is used as client for the remote control, other platforms like iPhone or Android-handy can be used after an easy modification of the client. The client has been built with NETIO, a TCP client with some free-styled operation elements. The surface is developed with a cloud-based system and is downloaded to the Android tablet. It has two sliders for the control of speed and direction, a gauge and text field in order to show the battery voltage (10 V range) and an On/Off-switch.
Further details you will find in the following attachments:
-Photos of the Catamaran
-Schematic
-Firmware of the ESP embedded as project in the development system
-Screenshot of Android tablet
-JSON (source) file of the NETIO surface
The experience is rather positive, the control distance is about 100 meters (depending on the sensitivity of your tablet) and the control works fine. The weak points are the LiPo cells with a capacity of 700 mAh, which reduce the length of the driving period. Because each fan takes a current of around 600 mA. I have ordered 18650-batteries with a capacity of 3400 mAh, which may solve the problem.
As MCU, I have choosed the splendid ESP8266 on a module ESP-201. This MCU controls a motor driver L293 for the power control of the fans. Unfortunately, these 5 V fans are not suited for normal PCM frequencies, so a rather large PCM period of 1 second was necessary. The ADC of the ESP monitors the battery voltage, which will be sent on request to the client. The power of the electronic and the fans are separated in order to avoid noise faults. More details you can see in the attached schematics.
The firmware has been written in C using the unofficial development system of Cherts. It configures the ESP as a freestanding, yet unsecured, WLAN, able to connect a small number of clients. Its IP address is 10.10.10.1 and the clients get addresses starting at 10.10.10.11. A TCP server listens for incoming messages from client and puts them into action.
An Android tablet is used as client for the remote control, other platforms like iPhone or Android-handy can be used after an easy modification of the client. The client has been built with NETIO, a TCP client with some free-styled operation elements. The surface is developed with a cloud-based system and is downloaded to the Android tablet. It has two sliders for the control of speed and direction, a gauge and text field in order to show the battery voltage (10 V range) and an On/Off-switch.
Further details you will find in the following attachments:
-Photos of the Catamaran
-Schematic
-Firmware of the ESP embedded as project in the development system
-Screenshot of Android tablet
-JSON (source) file of the NETIO surface
The experience is rather positive, the control distance is about 100 meters (depending on the sensitivity of your tablet) and the control works fine. The weak points are the LiPo cells with a capacity of 700 mAh, which reduce the length of the driving period. Because each fan takes a current of around 600 mA. I have ordered 18650-batteries with a capacity of 3400 mAh, which may solve the problem.
Want to build a project?
Bring your design to life with the Elektor PCB Service, powered by Eurocircuits. Upload the project files and order professionally manufactured PCBs or assembled boards through a proven European production platform.
Supporting KiCad, Eagle, Gerber, and ODB++ formats, the service is suitable for everything from prototypes and validation builds to series production and volume manufacturing.
Made in Europe. Fast. Reliable. Professional.
Discussion (1 comment)