
Pi-Loom (Useful Applications for the Raspberry Pi, part 1)
November 29, 2016
on
on
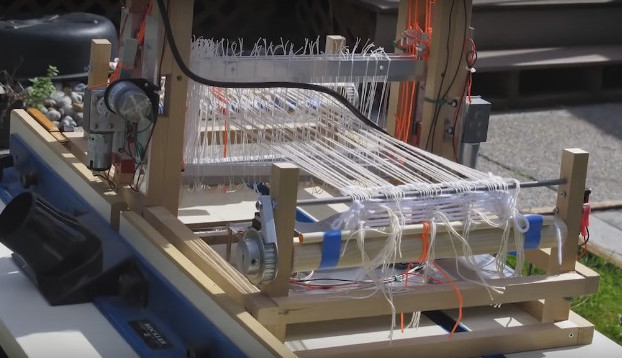
Frustrated with a computer controlled tabletop loom “that looked kind of fun to work with” but whose Java software failed to identify itself to a MacBook Pro running OS-X, Fred Hoefler heard his spouse Gina’s advice to “build a computer controlled loom with one of those Raspberry Pi things of yours”. Whether an idea, a rebuke or a marching order, Fred followed suit and turned techie with:
Fred did grapple with a H-bridge to drive the Cossen motor but failed to get it to work as desired on the RPi. He found that everything together on this project set him back about $150.
The loom is controlled with a simple Python script. As most loom control programs are controlled with a plain ASCII .wif file, adapting the Python program to using one of these control files should be simple. The source code can be found here. Fred on his web page for the RPi Loom project allows and invites all you programmers out there to use and modify the code as you wish, strictly under open-source conditions though.
- Cossen motor turning at 30 rpm, 120 N/cm torque. This motor could potentially lift more than 6 kg (63.2 N/9.80665 N =~6.4 kg). As far as speed is concerned, 1.9 cm x 2pi x 30 rpm = 358 cm/min which converts to 2.3 inches/sec.
- Use “lifted” harnesses through a series of pulleys and actuator arms.
- motor control unit uses 12 V relays and TIP120 darlington transistors;
- motor actuation “over timed limit switches used to stop the travel;
- requirement: no single part of the loom can cost more than $35 (i.e. price of the RPi);
- requirement: keyboard and monitor plugged into the Pi or indirectly through a wi-fi SSH connection using a stock terminal utility on a PC or Mac.
Fred did grapple with a H-bridge to drive the Cossen motor but failed to get it to work as desired on the RPi. He found that everything together on this project set him back about $150.
The loom is controlled with a simple Python script. As most loom control programs are controlled with a plain ASCII .wif file, adapting the Python program to using one of these control files should be simple. The source code can be found here. Fred on his web page for the RPi Loom project allows and invites all you programmers out there to use and modify the code as you wish, strictly under open-source conditions though.
Show time!
(no audio on these videos; there's nothing wrong with your PC)Read full article
Hide full article
Discussion (0 comments)