A self-balancing two-wheeled robot is always fun to play with, but this one is Wi-Fi controllable, and it feeds a live video stream from its ESP32 Camera Module!
Here's a great project from aadhuniklabs over at hackster.io that demonstrates the use of Proportional-Integral-Derivative (PID) control, and then proceeds to show off by adding Wi-Fi remote control and an ESP32 Camera Module.
PID control is central to many fields, especially in industry and robotics: For us to perform any kind of autonomous activity, we need a method of gauging whether we’re doing the right thing or not, so we can correct our behavior accordingly.
The feedback loop inherent in the PID mechanism is what keeps our bot standing. Leaning a little too far forward? Move the wheels forward a bit to catch up, and vice-versa.
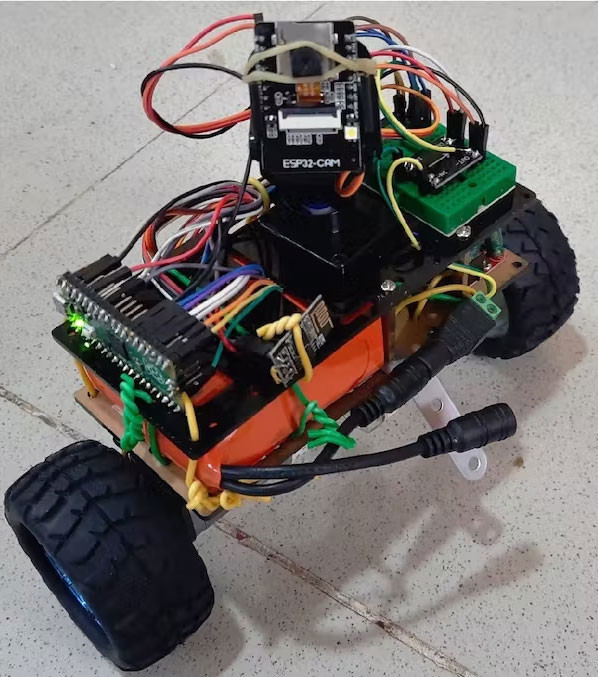
To achieve this, the author demonstrates the use of a Raspberry Pi Pico board running in dual-core mode at 250 MHz. Getting the robot to balance is an impressive footless feat. The rest is just showing off:
An ESP32 Camera Module sends a live video feed to the host controller (a PC) via Wi-Fi (ESP8266), and you can control the robot to move it around (so it does more than just balance). Do you have to point the robot in exactly the direction you want the camera to look? No, the bot design also features a pan-tilt-zoom controller for the camera, so you can even move the camera while the robot is minding its own business doing its balancing thing.
Best of all, the documentation for all of this is really comprehensive, so you can get it all up and running (wheeling?) in about three hours. Check out the detailed project here.
Elektor Magazine has been one of the leading sources of information on electronics for engineers, designers, start-ups and companies for 65 years. Our magazine is powered by an active community of electronics engineers – from students to professionals – who are passionate about designing and sharing innovative ideas.
For them, we publish hundreds of items a year, in formats such as articles, videos, webinars, and other learning formats. Our mission is to share knowledge in every possible way and inspire readers with the latest developments within the electrical engineering sector.
Thank you for your vote!
Leave further comments in the fields below.
Thank you for your vote!
If you wish to leave a comment with your rating, please first use the login below. If not, just close this window.


Discussion (0 comments)