
command for step motor to be placed on X axis of a lathe
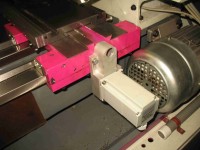
I have a little lathe without cross gearbox. The X-axis must thus be moved manually. I want to place a step motor on the X-axis and create a circuitry (electronic multiplier) for proportional driving of this X-axis relatively to the motion of the-Z axis.
I have a little lathe without cross gearbox (there is only one leadscrew). The X-axis must thus be moved manually. I want to place a step motor on the X-axis and create a circuitry for proportional driving of this X-axis relatively to the motion of the-Z axis. The proportionality factor (relation between the X-axis speed and the Z-axis speed), must to be adjusted with precision and stay stable during turning operation. Example: to turn a piece with conical portion(s). This project needs also to obtain a very precise leadscrew revolution speed information to can drive accurately this circuitry, taking in account that this screw must rotate very slowly !.
Documents are jointed to describe principles to be investigated: (no yet electronics, bud first mechanics !)
- pdf file Elektor project - X-axis by Z-axis control principle EN v6;
- fichier pdf "Projet Elektor - Principe asservissement axe X à l'axe Z FR v6" (version FR du précédent);
- pdf file "looking for an analog solution EN v4";
- pdf file "trails for a digital solution EN".
Documents are jointed to describe principles to be investigated: (no yet electronics, bud first mechanics !)
- pdf file Elektor project - X-axis by Z-axis control principle EN v6;
- fichier pdf "Projet Elektor - Principe asservissement axe X à l'axe Z FR v6" (version FR du précédent);
- pdf file "looking for an analog solution EN v4";
- pdf file "trails for a digital solution EN".
- Excel file "project numbers summary"
- Excel file "servo parameters v6" (detailled calculi);
- Excel file "servo parameters v6" (detailled calculi);
Build This Project
Bring this design to life with the Elektor PCB Service, powered by Eurocircuits. Upload the project files and order professionally manufactured PCBs or assembled boards through a proven European production platform.
Supporting KiCad, Eagle, Gerber, and ODB++ formats, the service is suitable for everything from prototypes and validation builds to series production and volume manufacturing.
Made in Europe. Fast. Reliable. Professional.
Updates from the author