
Seeing is believing: SCAMP robot can perch and climb walls (and fly too)
March 22, 2016
on
on
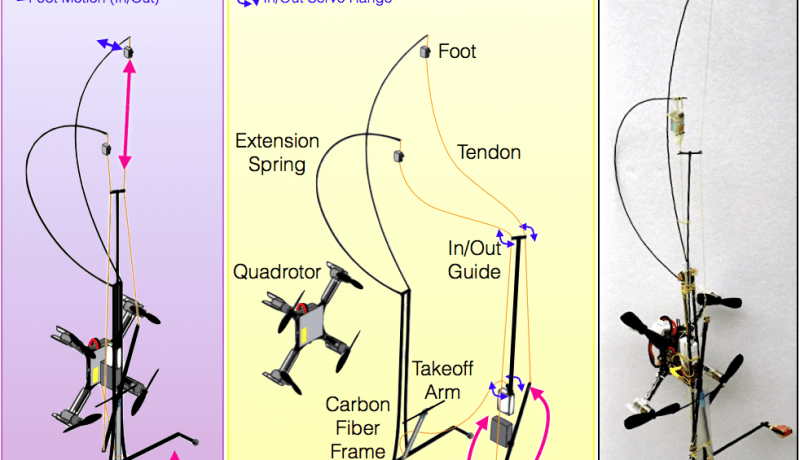
Not to be confused with Elektor’s 1970s famous DYI computer called SC/MP (pronounced “scamp”), SCAMP (Stanford Climbing and Aerial Maneuvering Platform) is a robot capable of flying, perching, climbing, recovering from failure, and taking off — using only onboard sensing and computations. SCAMP being “on the boundary of airborne and surface locomotion” (according to IEEE) it can go (and stay) where bipeds, Transformers and other Hollywood-devised super powerful robots, can't.
The most remarkable aspect of SCAMP is its ability to climb vertical surfaces like walls left standing after an earthquake, and remain in stable position much longer than a drone can fly. SCAMP takes off to the air when it senses a fall. Stanford researchers call their invention part woodpecker, part Daddy long-legs, and part hummingbird. Applications include measuring aftershocks; or setting up a temporary communications network.
SCAMP flies tail-first into the wall. It detects the acceleration spike on impact and turns its rotors up to maximum. The tail acts as a pivot, and SCAMP attaches to the wall aerodynamically while its feet find good places to grip.
The most remarkable aspect of SCAMP is its ability to climb vertical surfaces like walls left standing after an earthquake, and remain in stable position much longer than a drone can fly. SCAMP takes off to the air when it senses a fall. Stanford researchers call their invention part woodpecker, part Daddy long-legs, and part hummingbird. Applications include measuring aftershocks; or setting up a temporary communications network.
SCAMP flies tail-first into the wall. It detects the acceleration spike on impact and turns its rotors up to maximum. The tail acts as a pivot, and SCAMP attaches to the wall aerodynamically while its feet find good places to grip.
Read full article
Hide full article
Discussion (0 comments)