
Free Fresh Article: BalBot: a Self-Balancing Robot
April 24, 2020
on
on
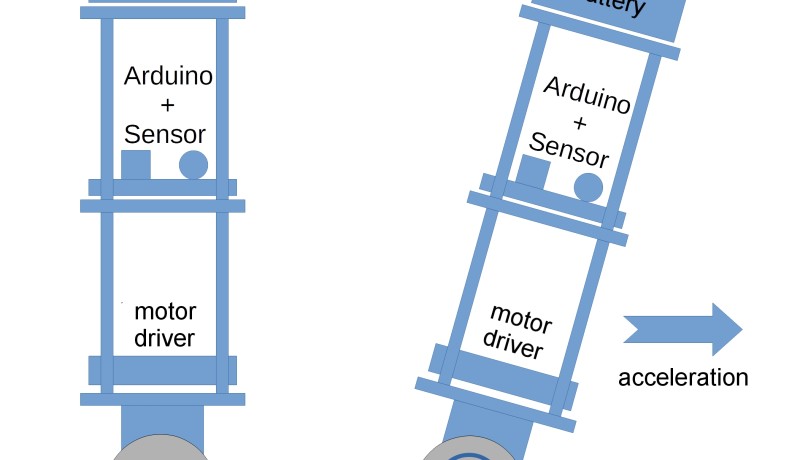
The construction of self-balancing robots can serve as a preliminary stage of androids, since movement on two parallel wheels requires a control similar to that of the walking upright. In this project, an Arduino Uno and an IC comprising an acceleration sensor and a gyroscope are employed.
The article is released for direct viewing in your web browser here.
The article is released for direct viewing in your web browser here.
Read full article
Hide full article
Discussion (11 comments)