
Highly automated cars are dangerous
on
In the present generation of automated cars the driver has to pay attention and has to intervene when necessary. From the doctoral thesis of Daniël Heikoop (TU Delft) it appears that this task, when you are not actively driving, is very tiring and that the drivers are often insufficiently alert.
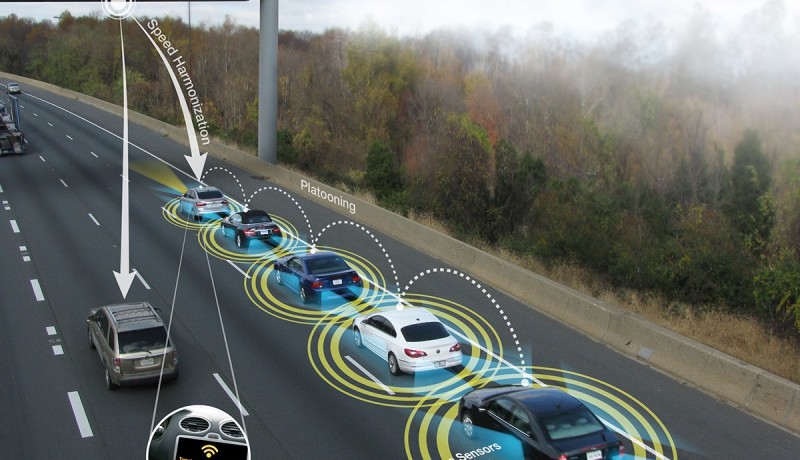
Platooning
As a solution for the traffic-jam problems on motorways the suggestion for ‘platooning’ is often made: autonomous vehicles that closely follow each other in a column. According to Daniël Heikoop from the TU Delft this is, however, a very bad idea.
Automation
The automation of vehicles is ever increasing. It therefore becomes increasingly important to understand how drivers behave while they are driving such an automated car. Cars with systems such as Lane Keeping Assist or Adaptive Cruise Control offer the driver not only assistance, but force the driver to be continuously alert for dangerous situations or system malfunctions.
Sleep inducing
Maintaining this passive supervision is extremely boring and sleep inducing, according to the research carried out by Heikoop. For this he examined the psychological state of drivers during 35-minute trips in autonomously driving Teslas. The drivers needed to do nothing more than pay attention – but it appeared that the drivers had the tendency to fall asleep.
The researcher concluded that the scenario in which people are driving highly automated vehicles that nevertheless require constant monitoring, is a very dangerous scenario. It may be so that platooning will both reduce fuel consumption as well as the risk of traffic jams, but it would be better to introduce these functions only when the vehicles are truly fully autonomous. The present generation of autonomous vehicles is simply not reliable enough.
(Source: TU Delft)
Discussion (2 comments)