Self-driving vehicles are a hot topic. But few people consider one of the biggest problems with autonomous vehicle technology: it’s designed mainly for use on properly mapped urban areas. What about when an autonomous vehicle must drive on a country road? MIT researchers are addressing the issue.
Self-driving vehicles are a hot topic. But few people consider one of the biggest problems with autonomous vehicle technology: it’s designed mainly for use on properly mapped urban areas. What about when an autonomous vehicle must drive on a country road? MIT CSAIL researchers such as Teddy Ort are addressing the issue.
C. J. Abate: What is MapLite? Why did CSAIL initiate the project?
Teddy Ort: For all the progress that’s been made with technologies for self-driving cars, there still aren’t many places where they can actually reliably drive. Companies like Google only test their fleets in major cities where they’ve labeled the exact positions of things like lanes, curbs and stop signs. As a result, there’s no guarantee that they can safely drive on roads that are unpaved, unlit, or unreliably marked. MapLite represents an important first step to driving without 3-D maps, by enabling cars to navigate on roads that they’ve never been on before using only GPS and sensors.
The Toyota used for MapLite testing (Source: MIT CSAIL)
C. J.: How does the system work? Why LiDAR?
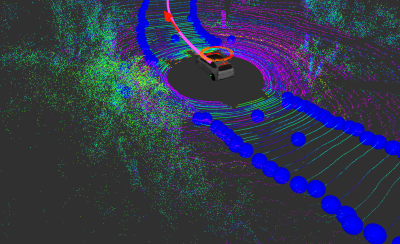
Teddy: Our system combines GPS data — like the kind you’d find on Google Maps — with data taken from LiDAR sensors. Together, these two elements allow us to autonomously drive a car on multiple unpaved country roads and reliably detect the road more than 100’ in advance.
The visualization of a car recognizing road edges
(Source: MIT CSAIL)
C. J.: Tell us about the test you ran with a 2015 Toyota Prius V in Devens, MA, USA. How were the results? What were the main takeaways from the experiment?
Teddy: We had actually begun working in this area using maps as is typically done. We sometimes spent many hours collecting sensor data, and building dense maps, only to find that when we wanted to drive autonomously just a few days later, we were unable to because the trees had lost their leaves or snow had fallen causing the maps to become outdated. When testing MapLite, one thing that stood out was how quick and easy it was to get started. I could just show up and push start and the car would start driving without having to prepare maps ahead of time. That was an amazing feeling.
C. J.: Do you think 3-D mapping and MapLite technology will converge? It seems unlikely that vehicle manufacturers would have to choose one or the other.
Teddy: There is no immediate timeline for deploying this kind of system into commercial cars. With that said, we are working closely on this with our research partners at Toyota, who are very excited about the possibility of incorporating these kinds of technologies into future vehicles.
C. J.:Do you think MapLite will have applications beyond autonomous driving in rural areas?
Teddy: Our goal is to further expand the diversity of different road types that it can handle, and ultimately have MapLite be as reliable as mapped systems, but with a much wider range.
Editor's note: Read more interviews with electronics industry innovators, engineers, researchers, and executives.
Elektor Magazine has been one of the leading sources of information on electronics for engineers, designers, start-ups and companies for 65 years. Our magazine is powered by an active community of electronics engineers – from students to professionals – who are passionate about designing and sharing innovative ideas.
For them, we publish hundreds of items a year, in formats such as articles, videos, webinars, and other learning formats. Our mission is to share knowledge in every possible way and inspire readers with the latest developments within the electrical engineering sector.
Thank you for your vote!
Leave further comments in the fields below.
Thank you for your vote!
If you wish to leave a comment with your rating, please first use the login below. If not, just close this window.


Discussion (0 comments)