
You Could Teach Autonomous Vehicles a Thing Or Two
May 29, 2019
on
on
Researchers at MIT are working on a new way for self-driving cars to navigate around unfamiliar areas by getting the control algorithm to mimic the way we all used to drive from A to B just by following a basic map on a GPS device. Called Variational End-to-End Navigation and Localization the system uses basic maps and video cameras to analyze the local environment and navigate to the destination.
All we need to find a way through is a basic map, such as that available on a GPS device. We are good at ignoring irrelevant features while at the same time identifying threats and obstacles in the path ahead.
Autonomous driving skills using 'End-to-End' navigation. Video: MIT/Amini
According to the team at MIT, the Variational End-to-End Navigation and Localization method studies human driving behaviour by learning from a human driver and then using that information to produce control algorithms that are more tolerant to route variations and will respond appropriately to new situations using only information from a basic map and video cameras to plot its course to the destination.
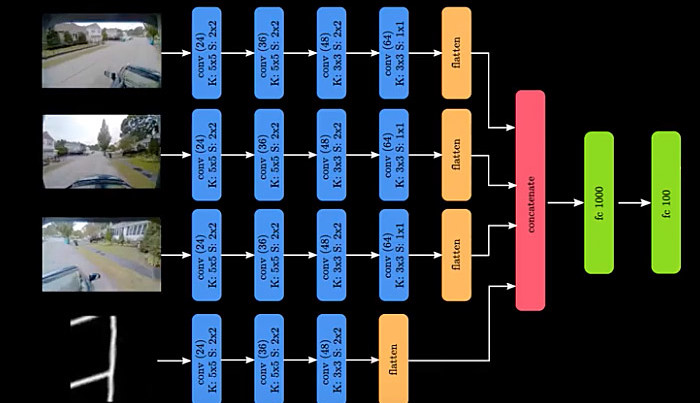
The team led by Daniela Rus, director of the Computer Science and Artificial Intelligence Laboratory (CSAIL), developed the end-to-end navigation system by using information from the human driver and applying statistical methods to predict appropriate steering inputs. MIT says that this prediction is based on a machine learning model called a convolutional neural network (CNN) which learns how to steer by processing images collected during training with the human driver. The system is designed to drive safely even when there are inconsistencies between the camera information and map data.
Use less memory space
The conventional approach to controlling self-driving vehicles relies on data-heavy information about the route between waypoints and uses on-board cameras and sensors to perform detailed mapping of the environment and control the vehicle path. Using this method the information needed to plan routes around a city the size of San Francisco can be up to 4 terabytes in size. Humans tend to get by using a lot less information and the MIT approach modelled on human navigation methods uses just 40 gigabytes to store information for all the countries of the world.All we need to find a way through is a basic map, such as that available on a GPS device. We are good at ignoring irrelevant features while at the same time identifying threats and obstacles in the path ahead.
According to the team at MIT, the Variational End-to-End Navigation and Localization method studies human driving behaviour by learning from a human driver and then using that information to produce control algorithms that are more tolerant to route variations and will respond appropriately to new situations using only information from a basic map and video cameras to plot its course to the destination.
The team led by Daniela Rus, director of the Computer Science and Artificial Intelligence Laboratory (CSAIL), developed the end-to-end navigation system by using information from the human driver and applying statistical methods to predict appropriate steering inputs. MIT says that this prediction is based on a machine learning model called a convolutional neural network (CNN) which learns how to steer by processing images collected during training with the human driver. The system is designed to drive safely even when there are inconsistencies between the camera information and map data.
Read full article
Hide full article
Discussion (0 comments)