| Today, entire systems are based around fully-featured bus architectures. A widespread industry standard ensures the long-term availability o...

More about bus (207)

| Interested in learning about serial, I²C, and SPI? Join Elektor on April 20, 2023 (4 PM Berlin) for a free webinar about the most popular co...

| This is a submission from Sensirion. The company has entered into a cooperation with Alps Alpine in the field of humidity and temperature se...
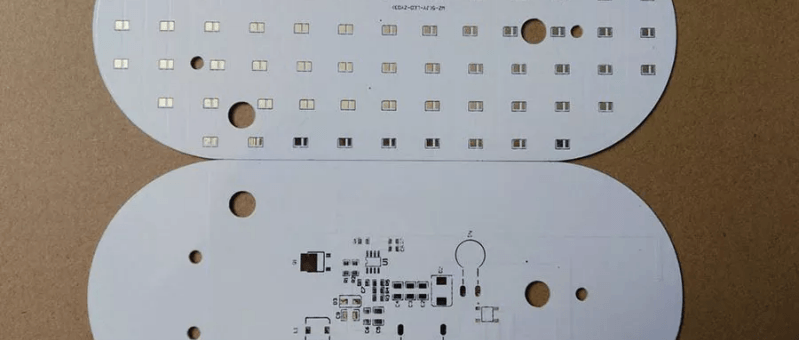
| Due to technical requirements and differences in manufacturing capabilities, special plates such as Rogers, copper substrates, aluminum subs...

| Neousys Technology became an official provider of the autonomous driving sensing platform among the collaboration between Industrial Technol...

| This is a submission from Power Integrations on the launch of its automotive-qualified SID1181KQ SCALE-iDriver™ gate driver for 750 V-rated...
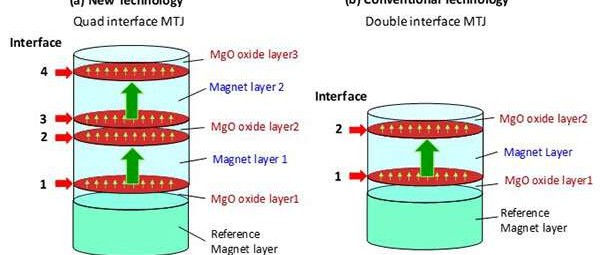
| Researchers at Tohoku University have succeeded in developing a new type of Magnetic Tunnel Junction (MTJ) structure that achieves long data...
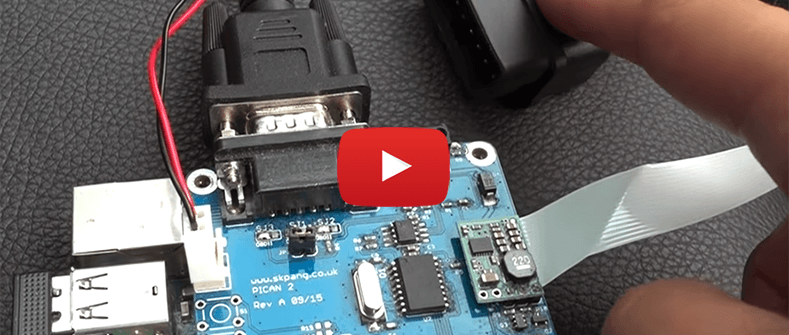
| A PiCAN 2 HAT provides your Raspberry Pi with full CAN-Bus capability: CAN v2.0B at 1 Mb/s and high-speed (10 MHz) SPI Interface. It uses th...
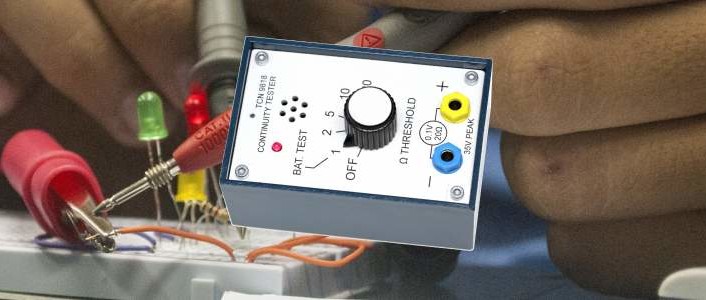
| Where many homegrown continuity testers are limited to a battery and a buzzer or maybe just an LED, this design uses a Wheatstone bridge ins...

| Microchip announces new dual- and single-core dsPIC33C Digital Signal Controllers (DSCs) with more options to meet changing application requ...